Petit Mal
Petit Mal: an Autonomous Robotic Artwork
A brief overview:
Although much work has been done in the field of screen-based interactive art, the mode of interaction in these works is confined by the very existence of image material on a screen, the so called "graphical user interface". I am particularly interested in interaction which takes place in the space of the body, in which kinesthetic intelligences, rather than "literary-imagistic" intelligences play a major part.
The goal of Petit Mal is to produce a robotic artwork which is truly autonomous; which is nimble and has "charm"; that senses and explores architectural space and that pursues and reacts to people; that gives the impression of intelligence and has behavior which is neither anthropomorphic nor zoomorphic, but which is unique to its physical and electronic nature.

The formulation "an autonomous robotic artwork" marks out a territory quite novel with respect to traditional artistic endevours as we have no canon of autonomous interactive esthetics. Petit Mal is an attempt to explore the esthetics of machine behavior and interactive behavior in a real world setting. Its public function is to present visitors with the embodiment of a machine "intelligence" which is substantially itself, not an automaton or simulation of some biological system. More generally, Petit Mal seeks to raise as issues the social and cultural implications of "Artificial Life". The reflexive nature of interactivity is a focal issue: interactive behavior is defined by the cultural experience of the human visitor. As in the Turing Test, evaluation of interactivity is subjective.

Petit Mal is in some sense an anti-robot. Most conventional robots are elaborations of von Neumanns~ notion of the universal machine, in which the physical machine is simply a formless form to be filled with software "content". This attitude is an application of the Cartesian idea of the mind-body split. Petit Mal is an attempt to build a robot which opposes this attitude. Hardware and software were considered as a seamless continuity, its behavior arises from the dynamics of its "body".
Petit Mal is not a tool in the sense that an industrial robot is a tool, it does not execute a predefined task in an optimized way. In robotics terminology it is a reactive robot, it is on its own little voyage of discovery. Although the principle of Brooksian subsumption architecture was influential, the software architecture of Petit Mal is a hybrid of various techniques devised with respect to its particular form and dynamics.

In neurological terminology, a Petit Mal is a momentary loss off consciousness. It is important that Petit Mal is just a little out of control, it is a reaction to oppresive theories of control so ubiquitous in computer science. It is an engineers nightmare, although the mechanical structure is inherently stable it has a chaotic motion generator at its heart, the double pendulum, an emblem of unpredictability.

Petit Mal was produced on a tiny budget and a conceptual efficiency or compactness was desired. The aim was to under-engineer as far as possible; to choose simple solutions over complex, even if they were statistically less reliable; to produce a robot which has seemingly intelligent relation to both objects and people, with the minimum of hardware, sensors and code. The design process of Petit Mal sought not to ~design out~ unreliable behavior, but to capitalize on mechanical or electronic quirks, such as the dynamics of the double pendulum structure or the limitations of a sensor, as generators of emergent behavior, of "personality".

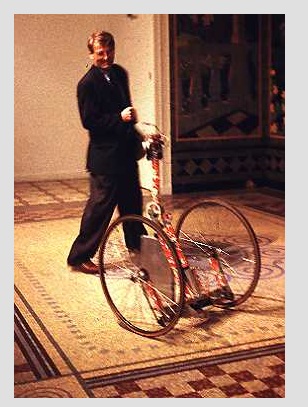
Its mechanical structure is a pair of nested pendulums of welded aluminium suspended from a pair of bicycle wheels on a common axis (a dicycle). This design is lightweight, economical (a full range of motion and control is achieved via only two motors) and self stabilising. The upper pendulum houses processor, sensors and logic power supply. The lower pendulum houses motors and motor power supply. The inner pendulum functions to keep the sensors (more or less) vertical while the under frame swings due to acceleration. Batteries in both frames function both as power source and counterweight. It has three ultrasonics sensors paired with three pyroelectric (bodyheat) sensors in the front and a fourth ultrasonic at the back. There is an accelerometer and two motors with optical encoders for motor feedback. These are coordinated by a single Motorola 68hc11 microprocessor. A second processor will be added to allow Petit Mal to learn. Petit Mal will function autonomously in a public space for several hours before requiring batery replacement.

Having designed the basic geometry of the work, the material aspects of the work were proscribed by the necessity that it be lightweight, durable and mechanically efficient. This led to a physical appearence which had a "laboratory prototype" esthetic which visually coded the work in a very specific way. An attempt to defuse or confuse that particular reading, while avoiding anthropomorphic/zoomorphic readings has been made by the addition of coverings of domestic printed vinyl tablecloth on some of the parts.
Petit Mal was first designed in 1989, building was begun in 1993. Assistants in the project have included Mark Needelman, Kurt Jurgen Schafer, Gabe Brisson and Jamieson Schulte.